I-8094H-G
高速 4 轴运动控制模块 (含 FRnet 功能,内建 CPU)


特色
- 独立的 4 轴运动控制
- 支持手摇轮和寸动功能
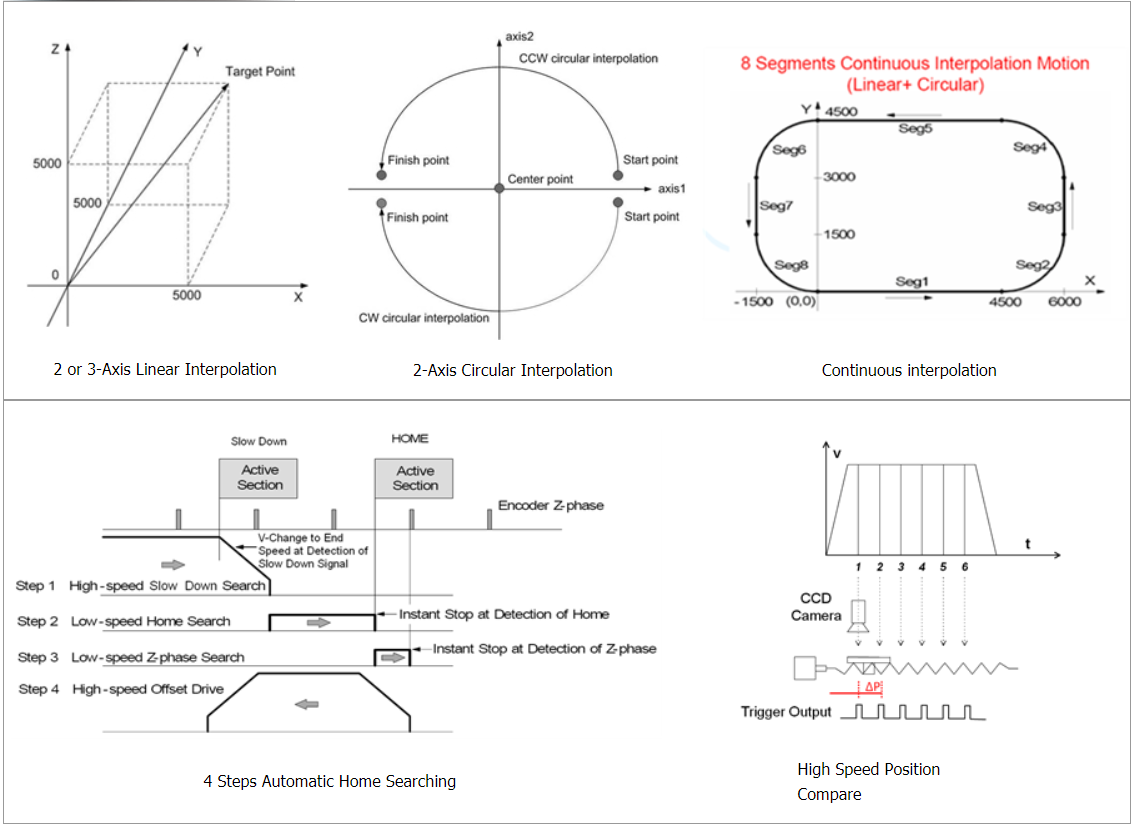
- 2/3 轴直线 / 2 轴圆弧补间功能
- 连续补间功能
- 可编程 T/S 型曲线加速和减速
- 每轴脉波输出率为 4 MHz (最高)
- 脉波输出模式:CW/CCW 或 PULSE/DIR
- 每轴有 32 位编码计数器
- 编码器脉波输入模式:A/B 相 或 Up/Down
- 每轴有可编程的自动归原点功能
- 位置比较处理和软件极限
- 多种同步动作 (事件触发动作)
- 可扩展远程 I/O 模块:透过两线式 FRnet 接口可扩展 128 DI 和 128 DO
介绍
I-8094H 是一个 4 轴的步进/脉波式伺服马达控制模块,可以用在任何泓格科技 I-8000 和 PAC 系列的控制器上,并通用于一般的运动控制应用。I-8094H 有 I-8094 全部功能之外,还配备一 FRnet Master 芯片,允许 I-8094H 可以简单扩展高速远程 I/O。两线式的 FRnet 接口能允许 128 个 DO 和 128 个 DI 通道,每 2.88 ms 内会自动扫描升级。内部的 CPU 让这个模块不需要 PAC 也可以执行运动操作。当与 PAC 一起工作时,也允许用户透过调用用户自行定义的子程序 (宏函式) 来执行额外的函式。用户可以嵌入他们自己订制的处理程序 (技术) 到这模块里面。
除了提供高速脉波输出外,此运动控制器还内建多种智能运动控制功能,譬如 2 轴/三轴的直线补间、 2 轴的圆弧补间、T/S 型曲线加减速、多样的同步动作设定与自动归原点等功能。以上 I-8094H 多数的运动控制功能是在高效能的运动 ASIC 上执行,其主要优点是对处理器造成的负担小。因此在运动状态与其他 I/O 模块在马达运动时,仍可以透过 PAC 闲置的处理器来监控实时数据。由于 I-8094H 对 CPU 的低负载需求,所以单一的 I-8000 和 PAC 系列可以使用一个或更多的运动模块。泓格科技也提供众多的函式和范例,用于减少额外撰写程序的需求,提供给运动控制应用开发者高效益的解决方案。
除了提供高速脉波输出外,此运动控制器还内建多种智能运动控制功能,譬如 2 轴/三轴的直线补间、 2 轴的圆弧补间、T/S 型曲线加减速、多样的同步动作设定与自动归原点等功能。以上 I-8094H 多数的运动控制功能是在高效能的运动 ASIC 上执行,其主要优点是对处理器造成的负担小。因此在运动状态与其他 I/O 模块在马达运动时,仍可以透过 PAC 闲置的处理器来监控实时数据。由于 I-8094H 对 CPU 的低负载需求,所以单一的 I-8000 和 PAC 系列可以使用一个或更多的运动模块。泓格科技也提供众多的函式和范例,用于减少额外撰写程序的需求,提供给运动控制应用开发者高效益的解决方案。
运动功能特色
应用
相似产品
| 軟件 | |
|---|---|
| 开发 | 用户定义的宏功能 |
| SDK | DOS 6.2 |
| 硬件 | |
|---|---|
| 接头 | 68-pin SCSI-II 接头 |
| 一般 | |
|---|---|
| 轴数 | 4 |
| 工作模式 | 半闭回路 |
| 同步动作 | 10 个动作条件 与 14 种动作 |
| 速度曲线 | T/S 曲线 |
| 位置控制模式 | 增量膜式 与 绝对模式 |
| 命令类型 | 脉波命令 |
| 自动归原点 | 有 |
| 输入讯号滤波 | 2 ~ 16 ms、8 stages |
| Axis I/O | |
|---|---|
| 伺服界面输出 | SVON |
| 手摇轮界面 | 有 |
| 机械开关输入 | Home、LMT+/-、 NHOME、EMG |
| 位置比较输出 | 10 KHz (仅 X、Y 轴) |
| 伺服界面输入 | INP、ALM |
| 编码器输入 | |
|---|---|
| 模式 | A/B Phase、Up/Down |
| 环状计数模式 | 32-bit |
| 计数速度 | 4 MHz (Max.) |
| 计数讯号宽度 | 32-bit |
| 脉波输出 | |
|---|---|
| 模式 | CW/CCW、PULSE/DIR |
| 脈波寬度 | 32-bit |
| 频率 | 4 MHz (Max.) |
| 插补 | |
|---|---|
| 圆弧补间 | 任意 2 轴 |
| 连续补间 | 有 |
| 直线补间 | 4 轴中任意 2 ~ 3 轴 |
| 数字量输入 | |
|---|---|
| 通道数 | 可扩展: 128 DI |
| 隔离 | 2500 Vrms 光隔离 |
| 数字量输出 | |
|---|---|
| 通道数 | 可扩展: 128 DO |
| 隔离 | 2500 Vrms 光隔离 |
| 电源 | |
|---|---|
| 功耗 | +5 V @ 500 mA |
| 环境 | |
|---|---|
| 工作温度 | -20 ~ +75°C |
| 储存温度 | -30 ~ +85°C |
| 湿度 | 10 ~ 90% 相对湿度,无结露 |